 Team members prep Pegasus for its first dive in almost a year! Team members prep Pegasus for its first dive in almost a year! May 7th, 2018 San Diego, CA From its inception, Project Pegasus has been ambitious, to say the least. However, I’m always exceedingly impressed by the commitment and dedication displayed by Project Pegasus team members. Last month we rewired Pegasus, but still couldn’t figure out why our little ROV wouldn’t power on. After a lengthy back and forth, the good folks at OpenROV® offered to take a look at Pegasus to see if they could figure out a solution. The plot thickened once Pegasus made it to OpenROV®’s headquarters. Here’s what Jordan had to say once we got Pegasus back: “It was great to see Pegasus all wired up and put together today. OpenROV® couldn’t figure out what was wrong with our ROV when we sent it in. They said that all of our soldered joints looked good (which is nice to hear from experts) but they ended up having to rewire it themselves. I am still glad however that we put in the time and rewired it ourselves because that was the best part of building Pegasus! Today (4/30) we attached the IMU sensor which gives us information about the orientation of the ROV as well as the depth. We didn’t have much extra wire to work with after we got Pegasus back from OpenROV®, so we had to “measure twice and cut once” when it came to re-soldering these joints. We also had the extra challenge of reattached the external light cubes. Once we finished this we turned on the ROV and it beeped its victorious sound of functionality! It was a gratifying sight to see it actually work after all of our hard work; the process of trying to fix our problems is a big part of this project. Our mistakes are where we learn the most. Nevertheless, the day was a success.”
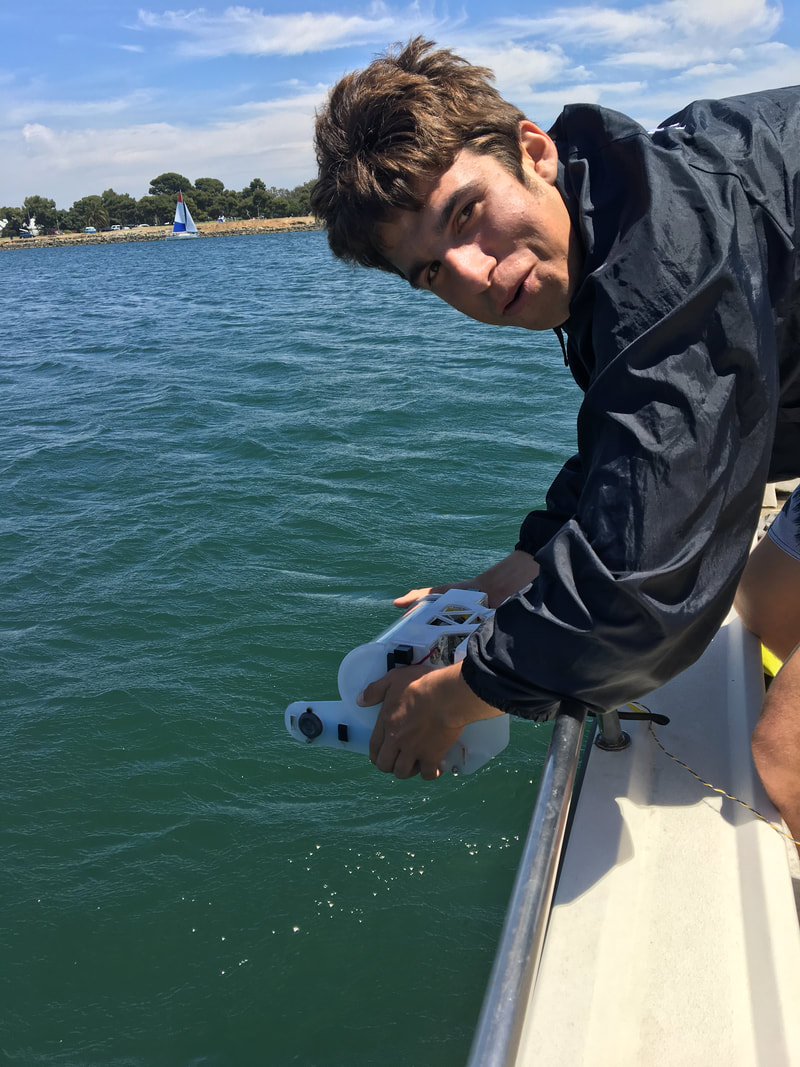
Well, once Pegasus was put back together, there was only one thing left to do; put our ROV back in the water! The team and I met at the Coastal and Marine Institute Laboratory on a bright Sunday morning, performed a quick water test using a freshwater bucket, and then headed over to Mission Bay for a more immersive experience. We decided to test Pegasus in the shallow, confined waters of Mission Bay just to make sure things went swimmingly. With bated breath, we deployed Pegasus off the side of one of CMIL’s boats. For the next 20 minutes team members took turns “flying” Pegasus around in the murky waters; taking it from the surface, down to the seagrass, and back up again. To everyone’s delight all systems were a go. That is, until we noticed a little bit of water in the electronics tube. We immediately cut power and brought Pegasus back to the surface. Thankfully there wasn’t much damaged to the electronics. But now we’ve got to figure out where that water came in from!
Project Pegasus has had its fair share of excitement, but as Jordan said, “we learn the most from our mistakes”. And I couldn’t agree more.
I’d like to give a big shoutout to Zack Johnson from OpenROV® for taking a lot of time to help us with Pegasus over these last couple of months. Stay tuned, we’ll have Pegasus back in action in no time! Cheers, -Baron von Urchin
0 Comments
Leave a Reply. |
AuthorPike Spector is currently a Research Operations Specialist with Channel Islands National Marine Sanctuary Archives
August 2022
Categories |




 RSS Feed
RSS Feed
