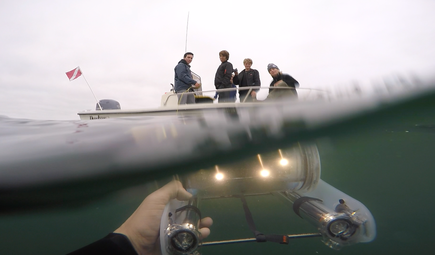
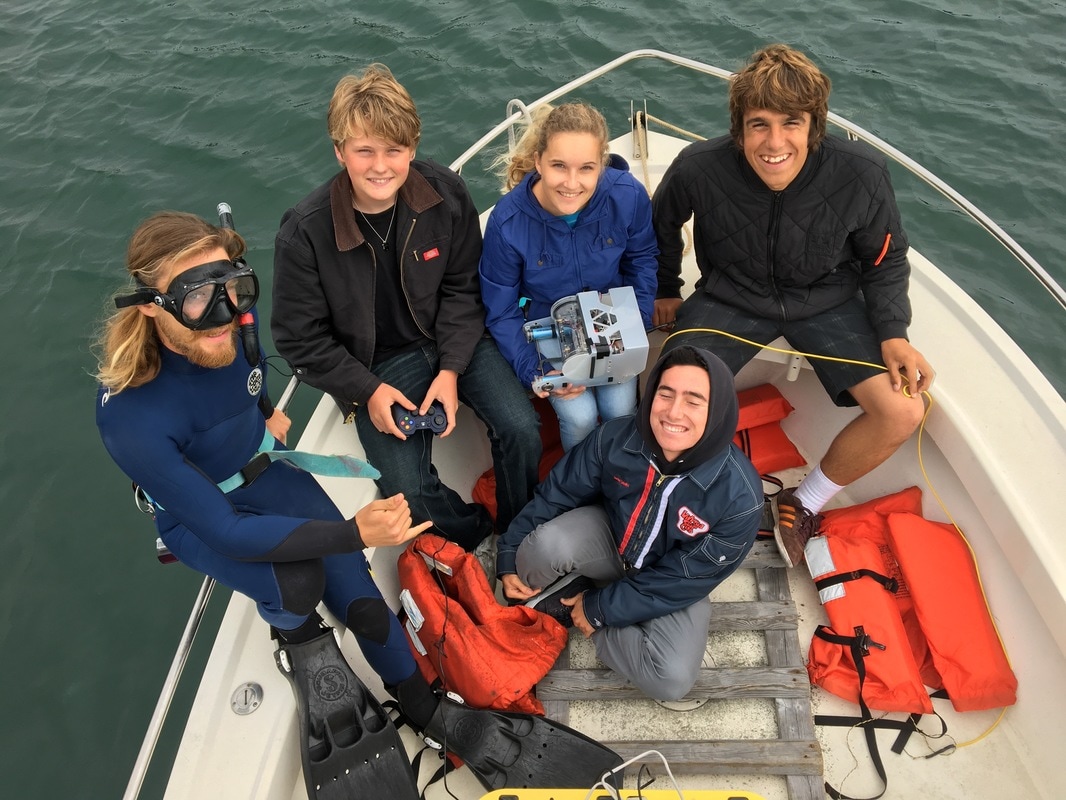
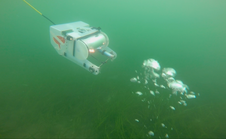
 Mission success! Pegasus "poses" in front of the topside crew Mission success! Pegasus "poses" in front of the topside crew 6/7/2017 San Diego, California Nearly three months of planning, preparation, and hard work have gone into this fateful day: Pegasus’s first plunge in salt water. From day one, when we opened our kit and started assembling our little ROV, the team has talked of almost nothing else. All of our hopes and aspirations rested on a successful first flight in salt water. In order to make sure everything went smoothly, we decided to test Pegasus in the shallow and protected waters of Mission Bay. On a cold and overcast Wednesday afternoon Project Pegasus team members set off on one of SDSU’s small boats, with the help of boat-handler extraordinaire (and fellow grad student/Edwards Lab mate) Tristin McHugh. We anchored in a shallow cove and prepared Pegasus for a fateful first dive.
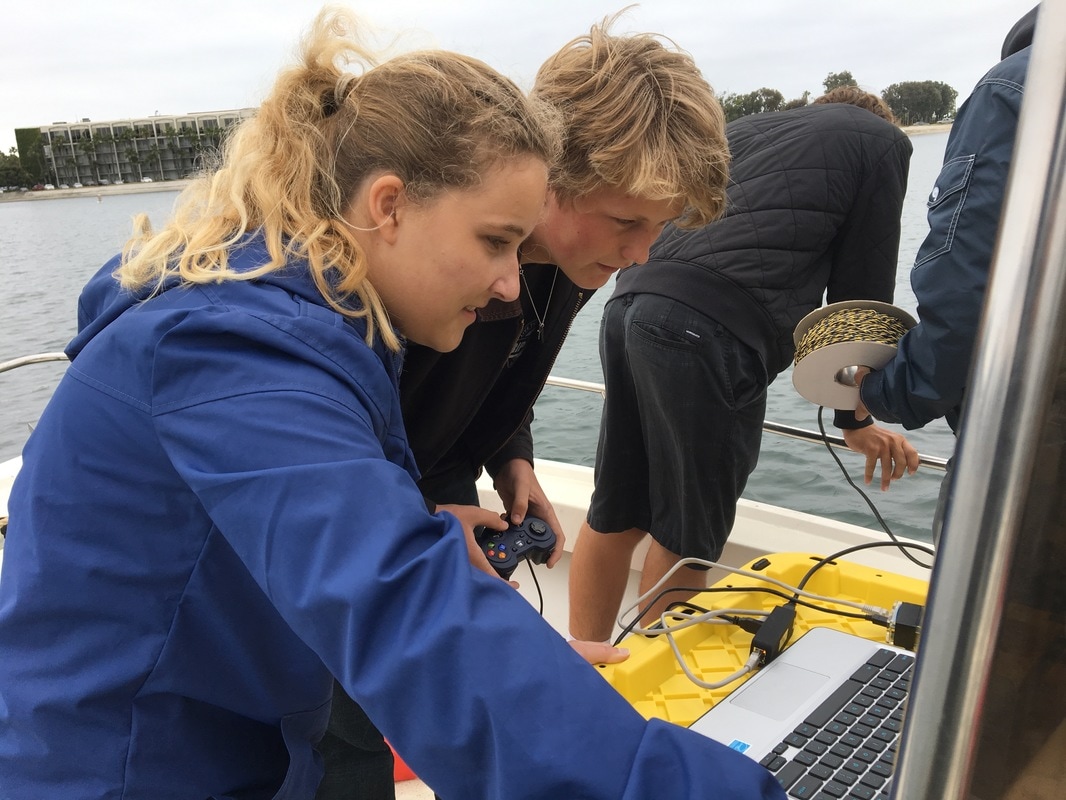
As it turns out, we experienced quite an emotional rollercoaster. All systems were a go; however, as we moved to drop our ROV in the water the camera image seized (much like our previous issue with the lasers). After rebooting the system, we tried again; and just like the first time just as we were about to drop Pegasus in the water the camera froze again. This happened not once, not twice but fives times! After our sixth reboot we decided to go for it… resulting in a flawless 35min dive! Our first “flight” of Pegasus took us on a tour of the murky water, through seagrass beds and around the boat. We quickly learned the nuances of a successful flight. As it turns out, Pegasus is a little heavy! Our negatively-buoyant ROV requires a lot of thrust to propel it through the water. We even learned what to do in the event of “entanglement” in environmental hazards, such as seagrass!
After three months I’m delighted to say Project Pegasus is a success. I’m incredibly proud of all of the hard work, dedication, and cohesion displayed by Project Pegasus team members. We all learned a suite of skills along the way, adding new tools to our toolboxes. However, it’s now time to pack up Pegasus in preparation for the Edwards Lab’s second research expedition to the Aleutian Islands.
Stay tuned! There will be plenty of updates from the Aleutians. And when we get back in the Fall, Project Pegasus will meet again to discuss a whole host of new projects for Pegasus. Thanks for following us along this incredible journey! Cheers, Baron von Urchin
0 Comments
 Lights, camera, action! Lights, camera, action! 6/4/17 San Diego, CA Sunday, June 4th was a momentous day for Project Pegasus; a lot of time, energy and prep-work went in to our first in-water test. However, before we could submerge our little robot, we first had to do a final bit of soldering. After the team and I installed external light cubes, which will allow Pegasus to shed extra light in the deep dark water, we did one final pre-dive safety check.
Here’s what Project Pegasus intern Maddie had to say: “Today is the day we’ve all been waiting for…putting Pegasus into the test pool! Our team has worked extremely hard to get to this point and we wouldn’t have been able to accomplish this feat alone. With everyone’s participation and unique skills, the box of various ROV components was soon transformed into a masterpiece that we call Pegasus. Despite the small problems we ran into during the build, Pegasus is definitely a top notch ROV. But we had one more thing to put on before Pegasus was in the water- the light cubes! This entailed hot gluing the two tiny (yet very bright) cubes onto the sides of the structural unit and soldering the wires to the control panel. Afterwards, we moved on to testing out the game controller that we will be using to control the lights, propellers, direction, and camera angle on Pegasus. It was truly amazing to see Pegasus come alive, something our team will never forget. Then came the most exciting moment; water time! We carried the computer, controller, and Pegasus out to the test pool and set everything up, making sure that this exciting event would run smoothly. We were all very nervous because we didn’t want our hard work to result in a flooded or destroyed of Pegasus. Team member, Lorenzo, got the honors of putting Pegasus into the water. Unfortunately, we had to pull it out within a minute because the camera wasn’t working, but we restarted it and put it back in the water. The camera then worked normally; the propellers allowed Pegasus to move, and the team was stoked! We each got a chance at using the game controller and viewing the action through the camera that sends live footage back to the computer. It was very exciting to see our ROV operating underwater! Aside from a few hiccups, everything went well and our team was thrilled!”
What a day indeed! It’s hard to believe that we’ve just wrapped up the construction phase of Project Pegasus. It has been an incredible process; I’m honored to have worked with such a dedicated and committed group of scientists-in-the-making. However, as Maddie said, we’re not out of the woods yet. We’ve got just a little bit more troubleshooting before we can pack up little Pegasus and send it off to the Aleutians! Stay tuned, next time Pegasus will get its first taste of saltwater! Cheers, Baron von Urchin  Project Pegasus interns as seen through the submerged the eye of Pegasus  Project Pegasus team members see themselves through the "eye" of Pegasus for the first time Project Pegasus team members see themselves through the "eye" of Pegasus for the first time 5/24/2017 - 6/1/2017 San Diego California We’ve officially reached the end of the modules for the construction of little Pegasus, and the team and I couldn’t be more thrilled! We’ve broken this post into two days because we ran into a little bit of an issue the first time we tried to turn on Pegasus. After charging the high-capacity lithium batteries that give our little ROV the juice it needs to run, we couldn’t get any feedback from the ROV itself. After a whole lot of head scratching, and a lot of time digging through internet forums, we realized that our batteries weren’t making contact in the battery tubes. After this “ah-ha’ moment all we had to do was solder a little bit of material onto the positive end of each battery so that they make good contact in their tubes. And then, violà! Little Pegasus came to life! But, our trouble shooting issues didn’t stop there.  Team member Jordan solders the tether connection while Maddy steadies Pegasus Team member Jordan solders the tether connection while Maddy steadies Pegasus Here’s what Project Pegasus intern Jordan had to say about these last two days: “5/24/17 The ROV is very close to completion. We were able to turn the ROV on and we saw the light show that it produced. It was a very cool sight to see, the ROV flashing its lights, especially because I know that we did all of the wiring and soldering in order to make it happen. We did some troubleshooting today with communication back from the ROV. The ROV would turn on but it wouldn’t send us communication back, which was problematic. For the sake of time we decided to move on and email OpenROV™’s [tech support] people about the issue. Next, we placed the O-rings on the battery tubes and the DB25 pin connector to make sure they are water tight. At this point in the construction of the ROV, there were no more directions. Because of this, communication with the team was crucial in order to make any new adaptations to the ROV. We wanted to solder a waterproof quick release to the ROV so that we would be able to disconnect the 100m long tether from the ROV. We were not sure how close to the ROV we wanted to solder the quick release, but we decided together what length we would solder it at.  Team member Maddy puts the finishing touches on a joint Team member Maddy puts the finishing touches on a joint 6/1/17 We had the amazing opportunity to video chat with Ms. Samantha [Wishnak] from the e/v Nautilus about their massive ROV called Hercules. She was able to talk to us about her daily life on the research vessel and how her team uses Hercules to obtain scientific data. Talking to her and asking her questions was very enlightening because many of us on our team want to pursue a career in ocean science and possible do exactly what Samantha is doing right now. After the video chat we got to work on finishing the ROV. The first thing we did was try to align and set the lasers on the ROV. There are two red lasers on the front of the ROV right next to the camera. These lasers measure how far away certain objects are from the ROV. This information will be important, along with live visual data from the ROV, to determine how close we want to get to an object underwater. We weren’t able to calibrate the lasers to what the directions wanted. The lasers were actually crossing, so the left laser was creating the right dot 3 meters away, and the right laser was creating the left dot 3 meters away. This is very problematic because that means the lasers are traveling at an angle, so the laser is going to travel further to hit the same object, which will make our measurements inaccurate. The last thing we did today was a very long and tedious task. We have 100 meters of [tether] cable that came with the ROV, but we want to line all of it in black [expandable PET] webbing to protect the tether. Essentially we needed to feed the 100-meter tether though the black webbing. On top of that the 100-meter cable was very mixed up in the ultimate tangled headphone conundrum. We split off into two teams; one team’s job was to try and untangle the mess of cable, and the other team’s jobs was to feed the cable through the black webbing. We switched off jobs here and there but it ended up taking us nearly two hours. By the end of two hours we had untangled the the monster and made great progress feeding the tether through the black mesh. It was a very rewarding moment in the end. Even though this process wasn’t very exciting, like soldering or solvent welding, it was a necessary step to reach our ultimate goal of completing the ROV.”
Great job team! I’m incredibly proud of all of the team members; their dedication and commitment has really paid off. Stay tuned, the next time Project Pegasus meets we’ll be submerging Pegasus in water for the first time!!! The clock is ticking; the Edwards Lab leaves for Alaska in just over one month! Cheers, -Baron von Urchin 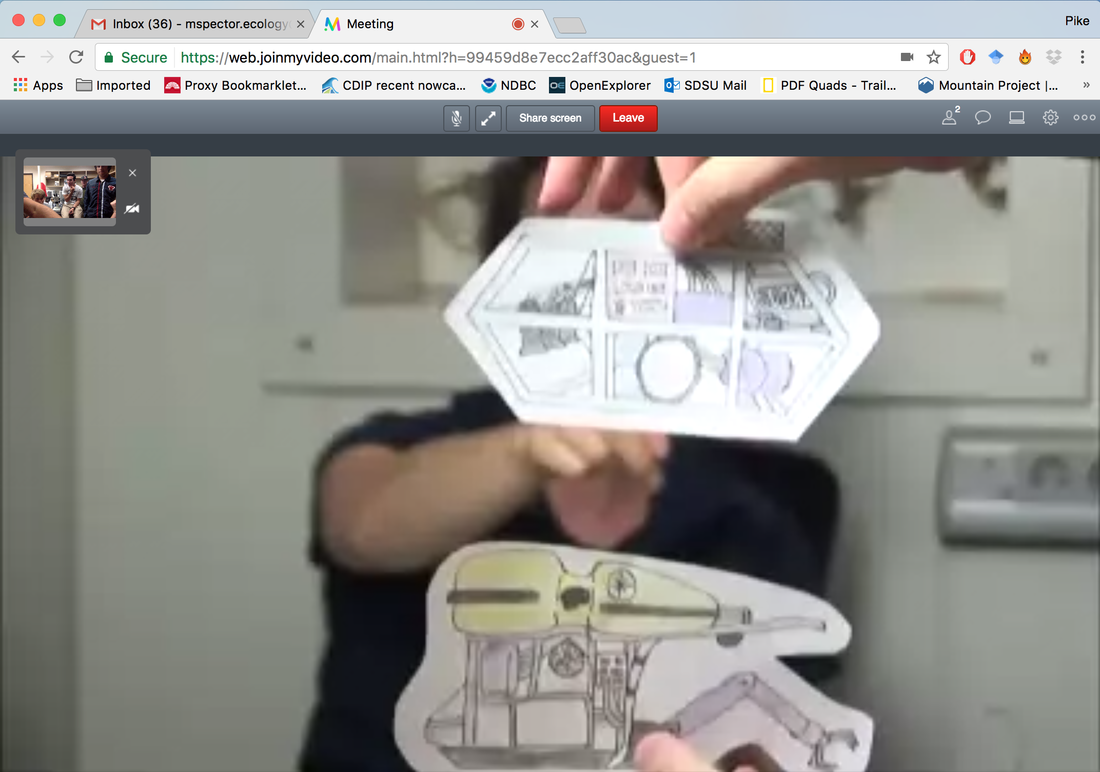 Special thanks to Ms. Samantha Wishnak for taking the time to talk to Project Pegasus live from e/v Nautilus |
AuthorPike Spector is currently a Research Operations Specialist with Channel Islands National Marine Sanctuary Archives
August 2022
Categories |






 RSS Feed
RSS Feed
